
Comprehensive Disease Identification and 3D Geological Modeling of Rock Mass Based on Elastic Wave CT and GPR
-
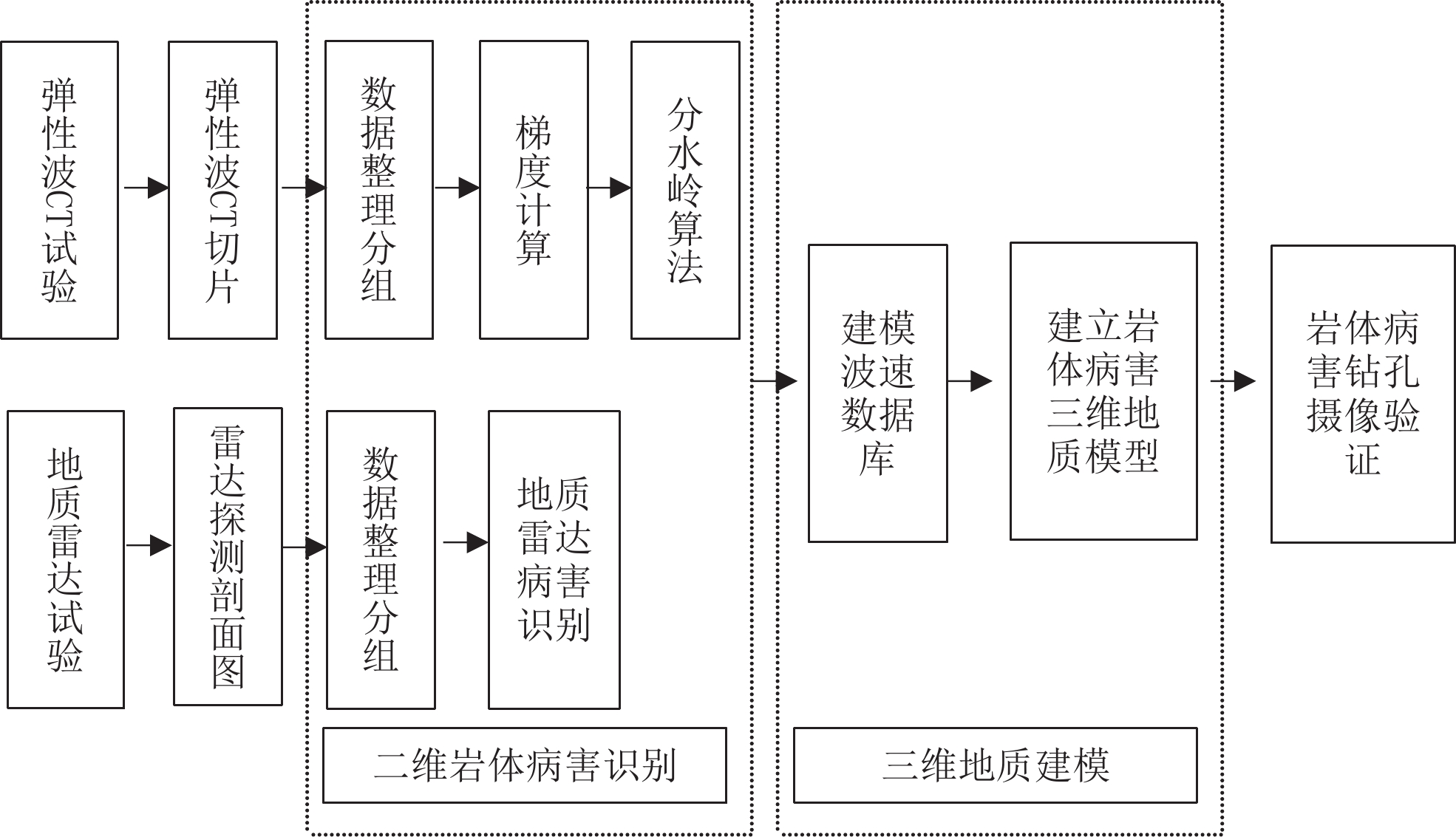
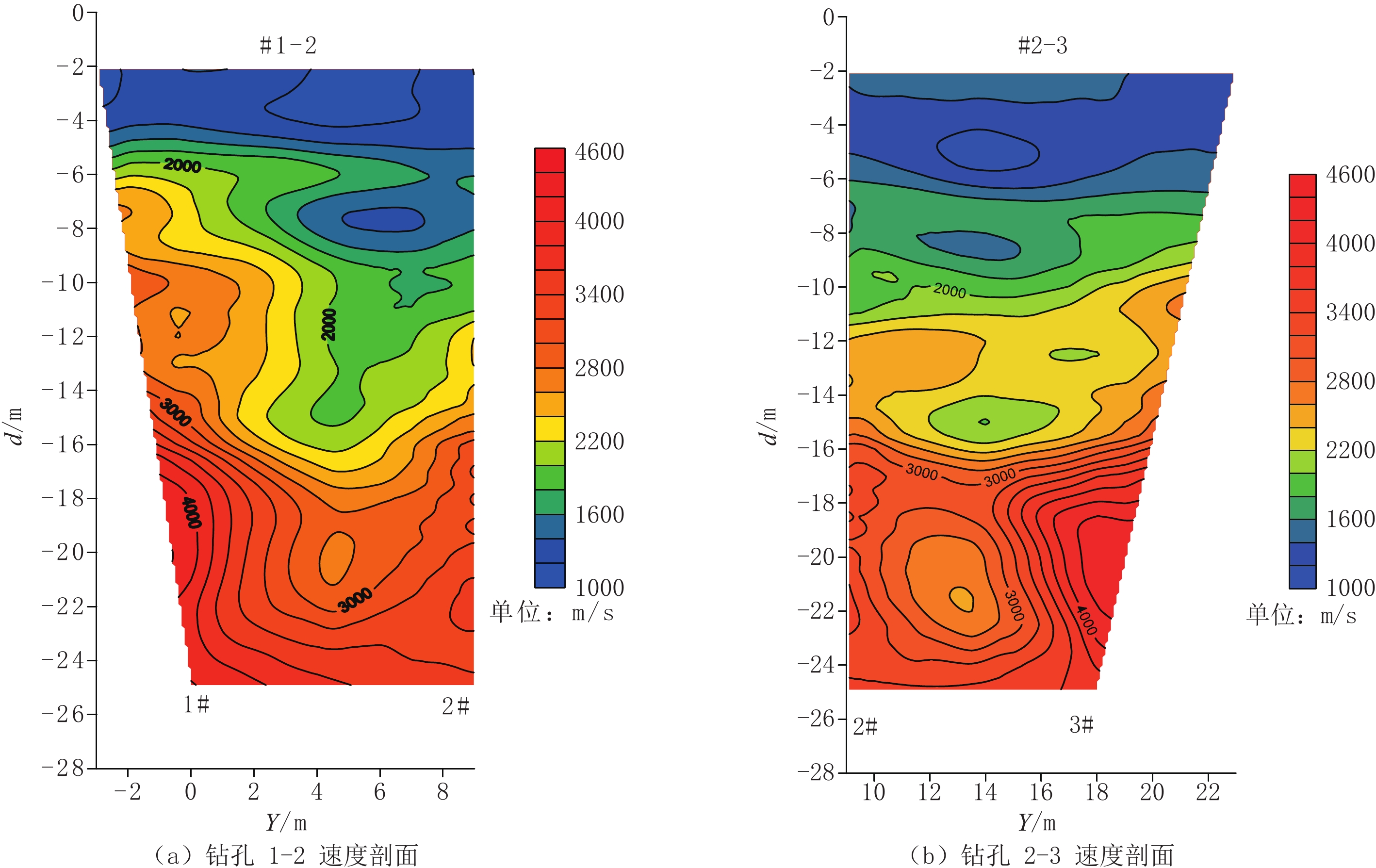
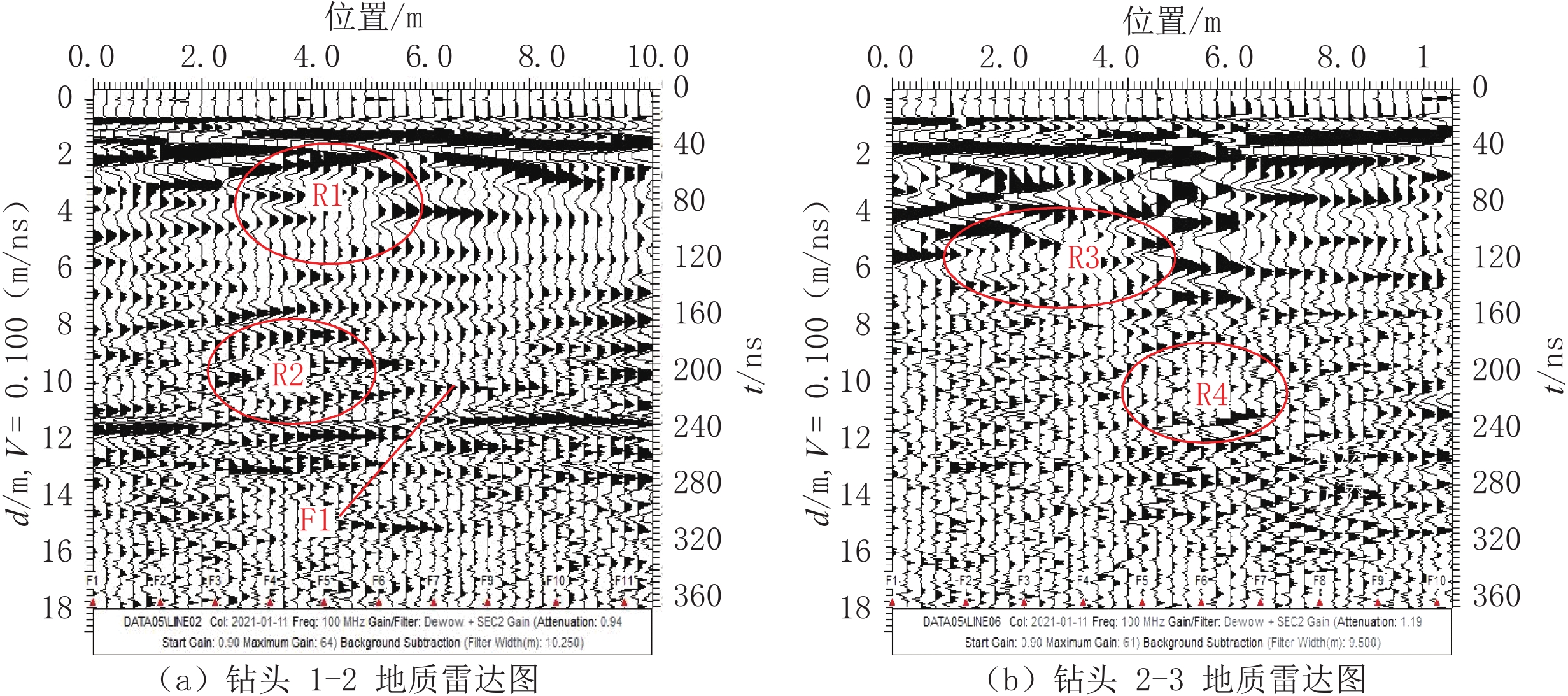
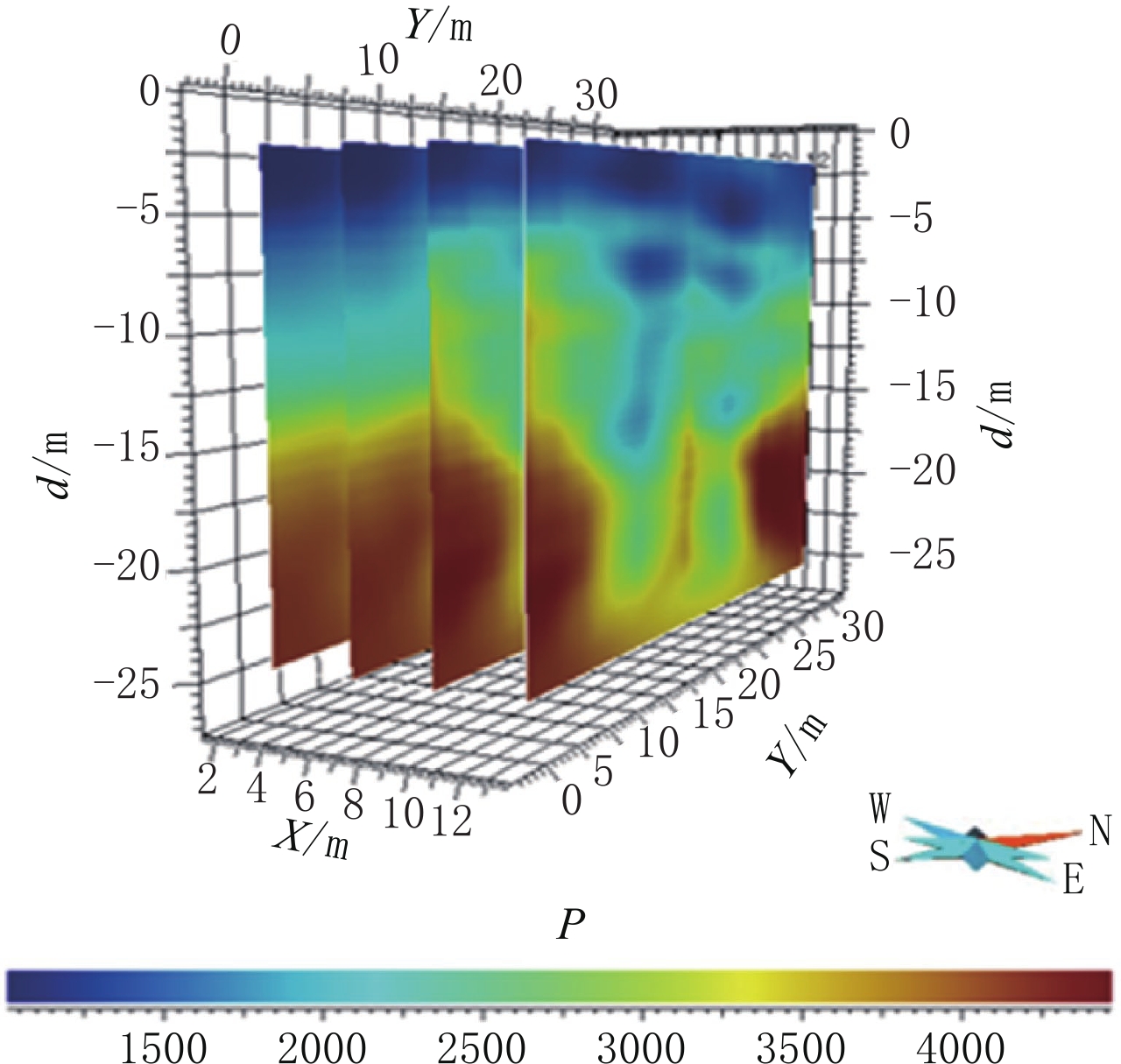
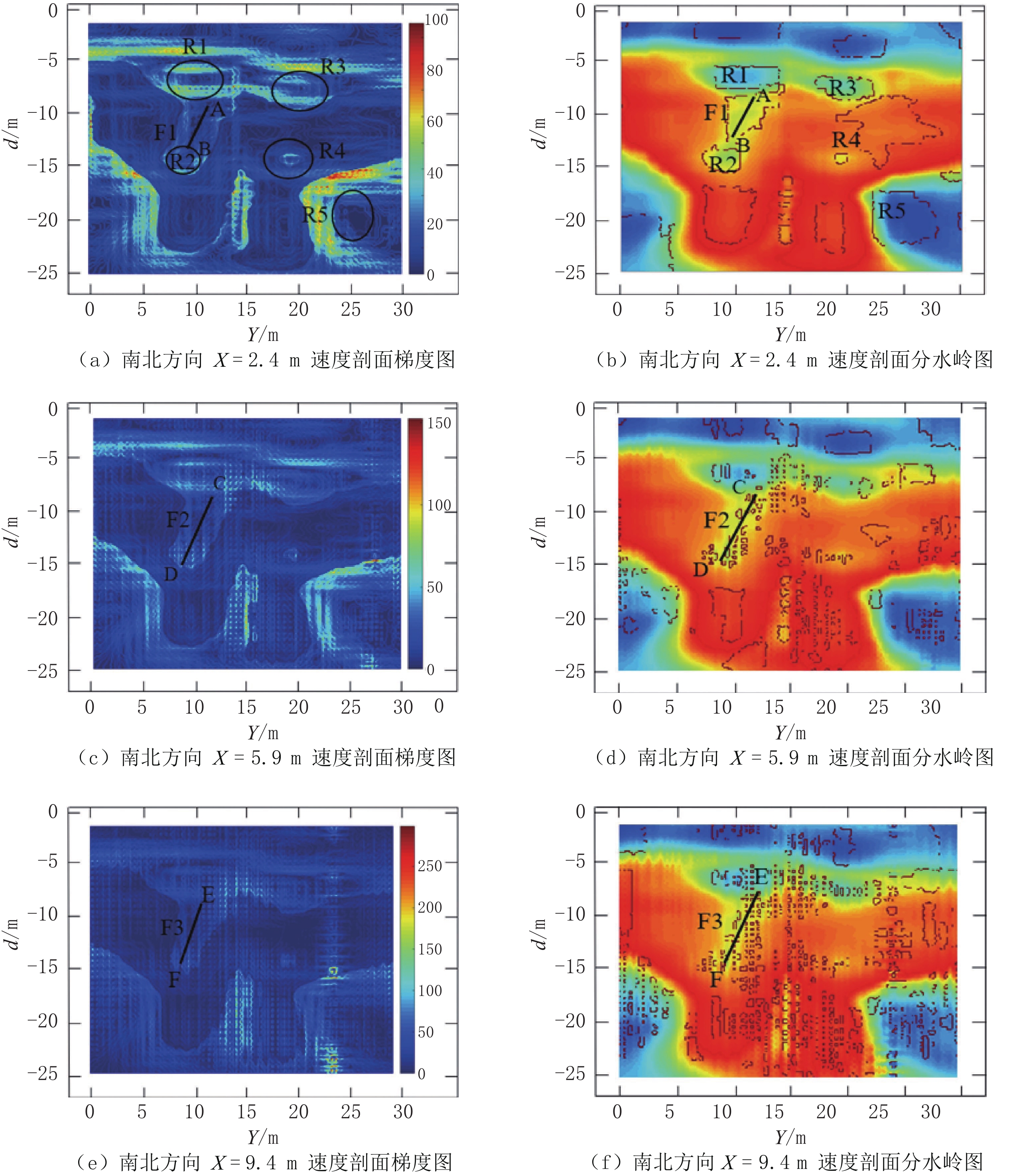
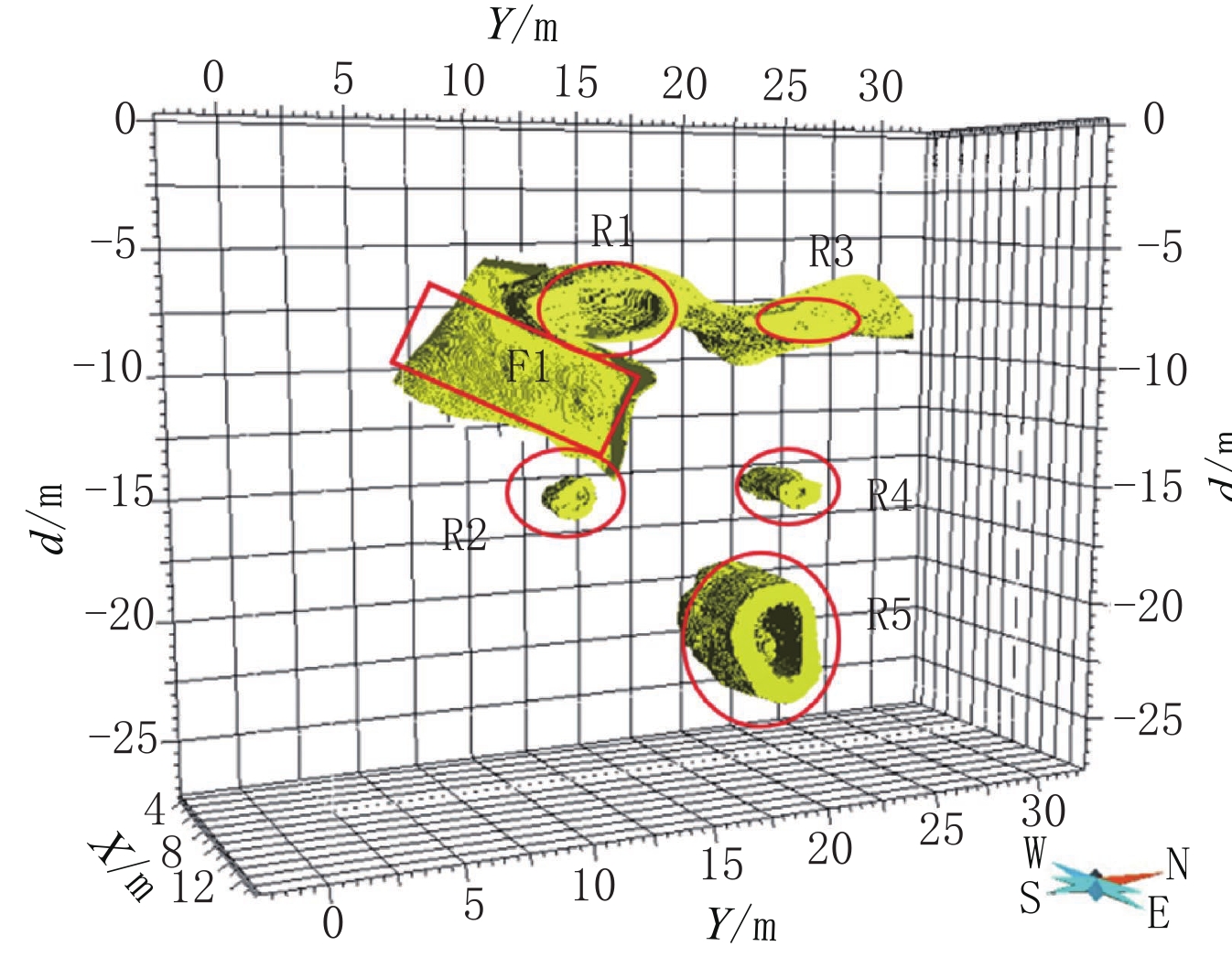
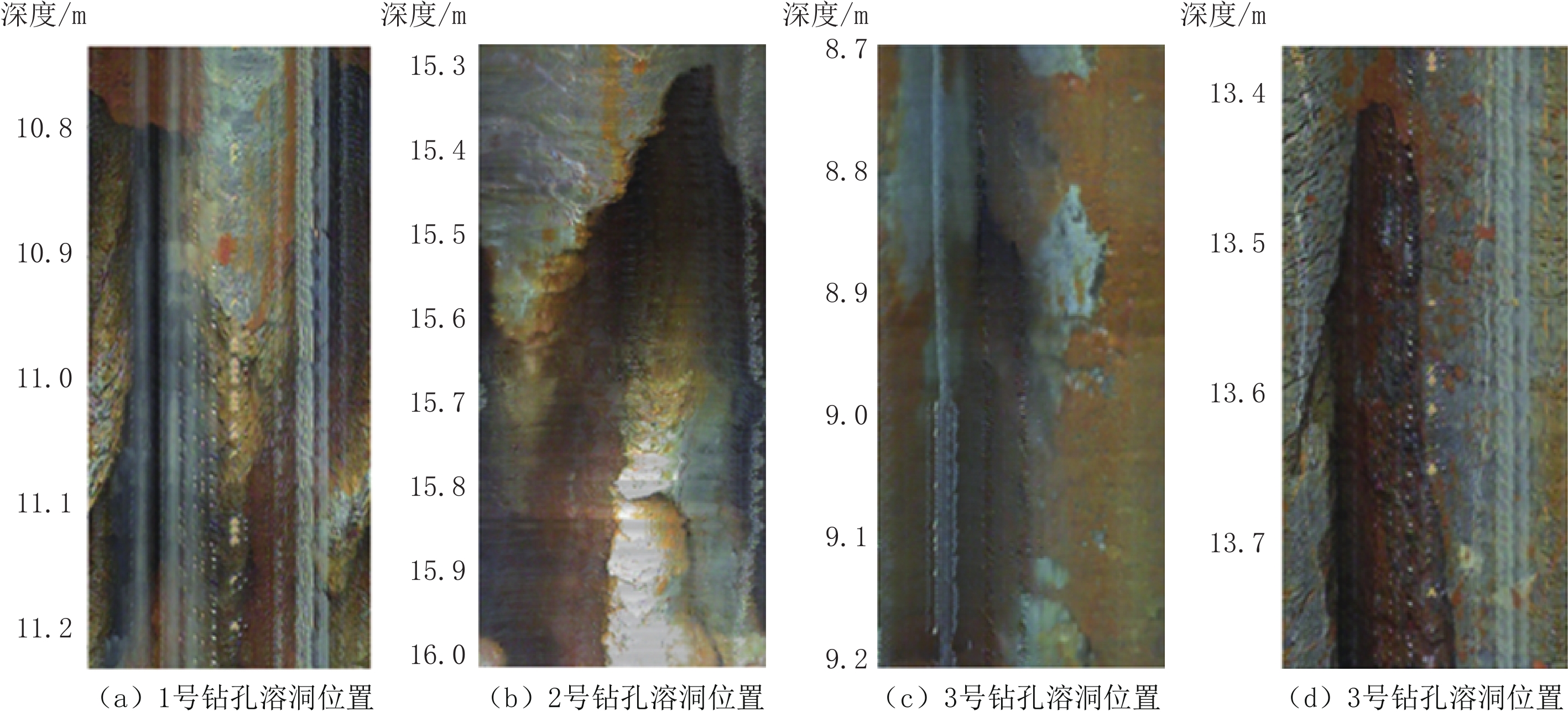
摘要: 本文以地铁深基坑岩体边坡为研究对象,采用弹性波CT初步判断基坑岩体病害的类型及空间分布并辅以地质雷达进行验证;进而用分水岭算法分析弹性波CT获得的波速分布,以提取病害处的细部声速变化,圈定病害范围;在此基础上,以弹性波CT三维空间波速数据库的坐标信息为基础,结合分水岭算法得到的空间坐标信息获得建模数据库,导入GOCAD软件,经过处理分析建立三维地质可视化模型。本文所建立的岩体病害模型与地质钻孔、窥孔成像、现场观察等高度吻合。本文提出的岩体病害识别方法和建模技术可为岩体支护设计提供重要参考,可为城市地下工程水害防治提供地质依据。Abstract: Taking the rock slope of the subway deep foundation pit as the research object, elastic wave CT is used to preliminarily judge the type and spatial distribution of rock mass diseases in foundation pit, which is then verified by geological radar. Furtherly the a watershed algorithm is adopted to analyze the wave velocity distribution obtained by elastic wave CT in order to extract the detailed sound velocity change at the rock cave and delineate its range. On this basis, based on the coordinate information of elastic wave CT three-dimensional spatial wave velocity database, combined with the spatial coordinate information obtained by watershed algorithm, the modeling database is constructed, after imported into GOCAD software, the three-dimensional geological visualization model is established after processing and analysis. The rock mass disease model established in this paper is highly consistent with geological drilling, peephole imaging and field observation. The proposed rock disease identification method and modeling technology can not only provide an important reference for rock mass support but also provide a basis for water disaster prevention of urban underground engineering.
-
-
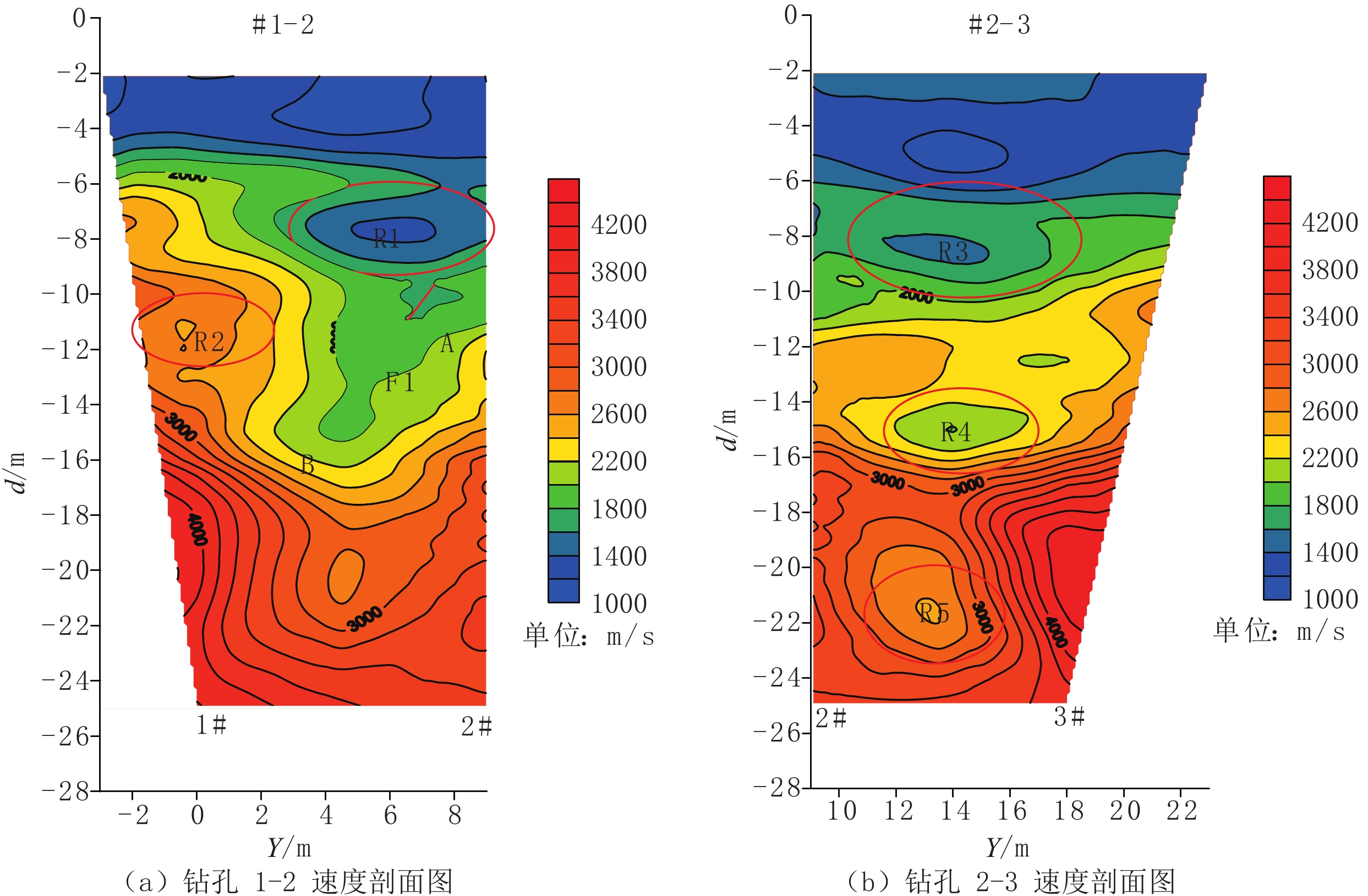
表 1 岩体病害三维空间位置
Table 1 3D spatial location of rock mass diseases
序号 X/m Y/m 深度/m R1 7.6~10 13~15 6.8~8.5 R2 7.8~10 6~8 10.8~11.2 R3 8~10 21~23 7~9 R4 9~10 18~22 14.3~15.5 R5 8~10 23~26 22~24 F1(A)
F1(B)2.4 11 10 2.4 9 15  下载: 导出CSV
下载: 导出CSV
-
[1] 李术才, 许振浩, 黄鑫, 等. 隧道突水突泥致灾构造分类、地质判识、孕灾模式与典型案例分析[J]. 岩石力学与工程学报, 2018,37(5): 1041−1069. LI S C, XU Z H, HUANG X, et al. Structural classification, geological identification, disaster pregnant mode and typical case analysis caused by water and mud inrush in tunnel[J]. Journal of Rock Mechanics and Engineering, 2018, 37(5): 1041−1069. (in Chinese).
[2] 王千年, 车爱兰, 郭强, 等. 孔内声波CT技术在软土地区地下溶洞调查中的应用[J]. 西北地震学报, 2011,33(S1): 335−339. WANG Q N, CHE A L, GUO Q, et al. Application of borehole acoustic CT technology in underground Karst cave investigation in soft soil area[J]. Northwest Seismological Journal, 2011, 33(S1): 335−339. (in Chinese).
[3] 李高, 郑旭辉, 张宝君, 等. 基于弹性波CT技术的岩体破裂探测方法[J]. CT理论与应用研究, 2015,24(5): 681−688. DOI: 10.15953/j.1004-4140.2015.24.05.05. LI G, ZHENG X H, ZHANG B J, et al. Rock mass fracture detection method based on elastic wave CT technology[J]. CT Theory and Applications, 2015, 24(5): 681−688. DOI: 10.15953/j.1004-4140.2015.24.05.05. (in Chinese).
[4] HU Y, ZHAO M Y, LIANG S. Research on detection standard of Karst roadbed grouting effect based on the geophysical methods[J]. Applied Mechanics and Materials, 2014: 3207.
[5] 刘少虹, 潘俊锋, 秦子晗, 等. 基于电磁波CT探测的掘进工作面冲击危险性评价技术研究[J]. 岩石力学与工程学报, 2017,36(S2): 4093−4101. LIU S H, PAN J F, QIN Z H, et al. Research on impact risk assessment technology of heading face based on electromagnetic wave CT detection[J]. Journal of Rock Mechanics and Engineering, 2017, 36(S2): 4093−4101. (in Chinese).
[6] 徐智勇, 王俊, 王时平. 井间电磁波CT在昆明地铁岩溶区地质勘察中的应用[J]. CT理论与应用研究, 2018,27(5): 617−626. DOI: 10.15953/j.1004-4140.2018.27.05.08. XU Z Y, WANG J, WANG S P. Application of cross well electromagnetic wave CT in geological survey of karst area of Kunming Metro[J]. CT Theory and Application, 2018, 27(5): 617−626. DOI: 10.15953/j.1004-4140.2018.27.05.08. (in Chinese).
[7] 蔡连初, 缪念有. 利用地震波CT技术精细化探测隧洞间岩溶构造[J]. 大坝与安全, 2014,(1): 57−58, 62. CAI L C, MIAO N Y. Fine detection of Karst structure between tunnels using seismic wave CT technology[J]. Dam and Safety, 2014, (1): 57−58, 62. (in Chinese).
[8] 刘超杨, 王波, 杨根兰. 基于克里金方法的岩体波速可视化模型研究[J]. 土工基础, 2017,31(1): 68−72, 88. LIU C Y, WANG B, YANG G L. Study on rock mass wave velocity visualization model based on Kriging method[J]. Geotechnical Foundation, 2017, 31(1): 68−72, 88. (in Chinese).
[9] 张琦, 周杰, 周天喜. 基于弹性波CT技术的三维模型在岩溶发育区的应用[J]. 国土资源导刊, 2018,15(3): 90−96. doi: 10.3969/j.issn.1672-5603.2018.03.018 ZHANG Q, ZHOU J, ZHOU T X. Application of three-dimensional model based on elastic wave CT technology in Karst development area[J]. Land and Resources Guide, 2018, 15(3): 90−96. (in Chinese). doi: 10.3969/j.issn.1672-5603.2018.03.018
[10] 王启明, 车爱兰. 基于CT探测技术的不良地质构造三维网格模型重构方法[J]. 岩石力学与工程学报, 2019,38(6): 1222−1232. WANG Q M, CHE A L. 3 D mesh model reconstruction method of unfavorable geological structure based on CT detection technology[J]. Journal of Rock Mechanics and Engineering, 2019, 38(6): 1222−1232. (in Chinese).
[11] 王启明. 不良地质构造三维网格模型重构方法及工程应用[D]. 上海: 上海交通大学, 2019. WANG Q M. Reconstruction method and engineering application of 3D grid model of adverse geological structure[D]. Shanghai: Shanghai Jiaotong University, 2019. (in Chinese).
[12] DIGABEL H, LANTUÉJOUL C. Iterative algorithms[J]. Biology and Medicine, 1978: 19.
[13] BEUCHER S, LANTUÉJOUL C. Use of watersheds in contour detection[C]//International workshop on image processing, real-time edge and motion detection. CEET 1979.
[14] 中华人民共和国国家标准编写组. GB 50021-2001岩土工程勘察规范[S]. 北京: 中国建筑工业出版社, 2009. National Standard Compilation Group of the People's Republic of China. GB 50021-2001 code for geotechnical investigation[S]. Beijing: China Construction Industry Press, 2009. (in Chinese).
[15] 马力. 工程弹性波CT质量检测与评价研究[D]. 荆州: 长江大学, 2018. MA L. Research on quality detection and evaluation of engineering elastic wave CT[D]. Jingzhou: Changjiang University, 2018. (in Chinese).
[16] FENG X, REN Q C, LIU C, et al. Joint acoustic full waveform inversion of crosshole seismic and GPR data in the frequency domain[J]. Geophysics, 2017, 82(6): 1-76.
-
期刊类型引用(3)
1. 张苏韬,郭文力. 术前动脉期CT影像组学列线图模型预测胰腺癌神经周围浸润的价值. 中国临床医学影像杂志. 2025(04): 265-270 .  百度学术
百度学术
2. 孟婷,阮志兵,徐茂丽,夏小梅. 基于CT影像组学构建术前预测胰腺癌神经周围侵犯模型的研究. 临床放射学杂志. 2024(01): 79-84 . 百度学术
3. 袁德琪,任国强. MSCT与MRI在胰腺癌诊断中的价值分析. 现代医用影像学. 2024(11): 2050-2052+2078 . 百度学术
其他类型引用(0)

计量
- 文章访问数: 492
- HTML全文浏览量: 278
- PDF下载量: 91
- 被引次数: 3


