
Design and Implementation of a 3D C-arm Control Service Protocol (RoboLINK) Based on DICOM
-
摘要: 三维成像技术辅助骨科机器人进行术前规划能够提高手术精确性和高效性,但目前基于三维数据的传统外科导航系统需要预先术前采图,再经过图片导入和人工配准,使得手术步骤愈加繁琐,且患者在采图和手术过程中的位置不同可能导致新的配准误差,导致精确度的降低。鉴于这一需求,本文设计一种基于DICOM协议的3D C-arm控制服务协议(RoboLINK),能将手术机器人和CT连接,可在手术过程中进行CT采图,为当前问题提供新的解决方案。在支持三维C臂与手术机器人进行数据传输的基础上,也可传输运动控制指令,达到设备相互协作的效果。根据以上设计,协议以一影医疗的3D C-arm和模拟手术机器人为实验环境,对协议进行测试。结果表明,RoboLINK协议能够有效完成数据传输和设备控制任务,具有可行性和安全性。Abstract: 3D imaging technology assisted orthopaedic robot for preoperative planning can improve the accuracy and efficiency of surgery. However, traditional surgical navigation systems based on 3D data currently need pre-operative drawing and manual registration. The surgical steps are cumbersome and new errors may be introduced during manual registration, resulting in the reduction of accuracy. To address this need, in this study, we design a remote device control service protocol (RoboLINK) based on the DICOM protocol, which can be used in operation and provides a novel solution to the current problem. Based on supporting data transmission between two medical devices, motion control instructions can also be transmitted to achieve mutual cooperation between devices. In accordance with this design method, the protocol is tested in a shadow medical 3D C-arm experimental environment and a simulated surgical robot. The results indicate that the RoboLINK protocol can effectively complete the tasks of data transmission and equipment control with the advantages of feasibility and security.
-
Keywords:
- DICOM /
- 3D C-arm /
- orthopaedic surgery robot /
- RoboLINK
-
-
![]()
图 6 协议测试环境。(a)一影医疗的三维C臂,(b)模拟骨科手术机器人示意图
Figure 6. Protocol test environment (a) is a 3D C-arm from First Image, (b) is Simulated orthopedic surgery robot
表 1 本文使用的DIMSE服务组
Table 1 The DIMSE service group used in this article
名称 功能 组别 DIMSE-C C-STORE 存储图像 C-FIND 按照属性查找图像 C-ECHO 检验DICOM连接 DIMSE-N N-EVENT-REPORT 报告当前状态 N-GET 获取属性值 N-SET 设置属性值 N-CREATE 创建SOP对象实例 N-DELETE 删除SOP对象实例  下载: 导出CSV
下载: 导出CSV
表 2 RoboLINK Base SOP服务元素
Table 2 Service elements of RoboLINK Base SOP
DIMSE服务元素 用法SCU/SCP N-CREATE M/M 注:M: Mandatory。
下载: 导出CSV
表 3 RoboLINK Base SOP服务状态
Table 3 Service status of RoboLINK Base SOP
服务状态 含义 状态码 Success SOP创建成功 0000 Failure 已经存在可用的SOP,必须注
销后才能创建新的SOPC616
下载: 导出CSV
表 4 RoboLINK Attribute Retrieve SOP 服务元素
Table 4 Service elements of RoboLINK Attribute Retrieve SOP
DIMSE服务元素 用法SCU/SCP N-SET M/M(根据功能选其一) N-DELETE M/M
下载: 导出CSV
表 5 RoboLINK Attribute Retrieve SOP私有属性表
Table 5 The private property of RoboLINK Attribute Retrieve SOP
属性名 Tag VR VM 描述 SYSTEM_Cmd 0x0041,0x0010 IS 1 系统信息ID编号 RobLinkServerVer 0x0041,0x0011 LO 1 RoboLink版本 ackSystemReport_Msg 0x0041,0x0032 LT 1 返回设备功能开启状况 reqSetMotionValues 0x0043,0x0040 LO 1 设置运动位置信息 ackCurAllSystemMsg 0x0041,0x0020 LO 1 系统各轴当前状态
下载: 导出CSV
表 6 RoboLINK Attribute Retrieve SOP状态
Table 6 The status of RoboLINK Attribute Retrieve SOP
服务状态 含义 状态码 Success SOP创建成功 0000 Warning 请求功能超出SOP的操作范围 B605 Failure 已经存在可用的SOP,必须注销后才能创建新的SOP C616
下载: 导出CSV
表 7 RoboLink Status Notification SOP服务元素
Table 7 Service elements of RoboLINK Status Notification SOP
DIMSE服务元素 用法SCU/SCP N-EVENT-REPORT M/M N-DELETE M/M
下载: 导出CSV
表 8 RoboLink Status Notification SOP私有属性表
Table 8 The private attribute of RoboLINK Status Notification SOP
属性名 Tag VR VM 描述 RoboLinkFunList 0x0041,0x0013 LO 1 产品支持功能
PatientRegist/MotionCtrl/CBCTWorkflowackCBCT_Step_Status 0x0041,0x0022 LO 1 CBCT步骤状态 ackFindAllSystemMsg 0x0041,0x0031 LO 1 系统各轴运动状态
下载: 导出CSV
表 9 软件功能测试
Table 9 Test of software function
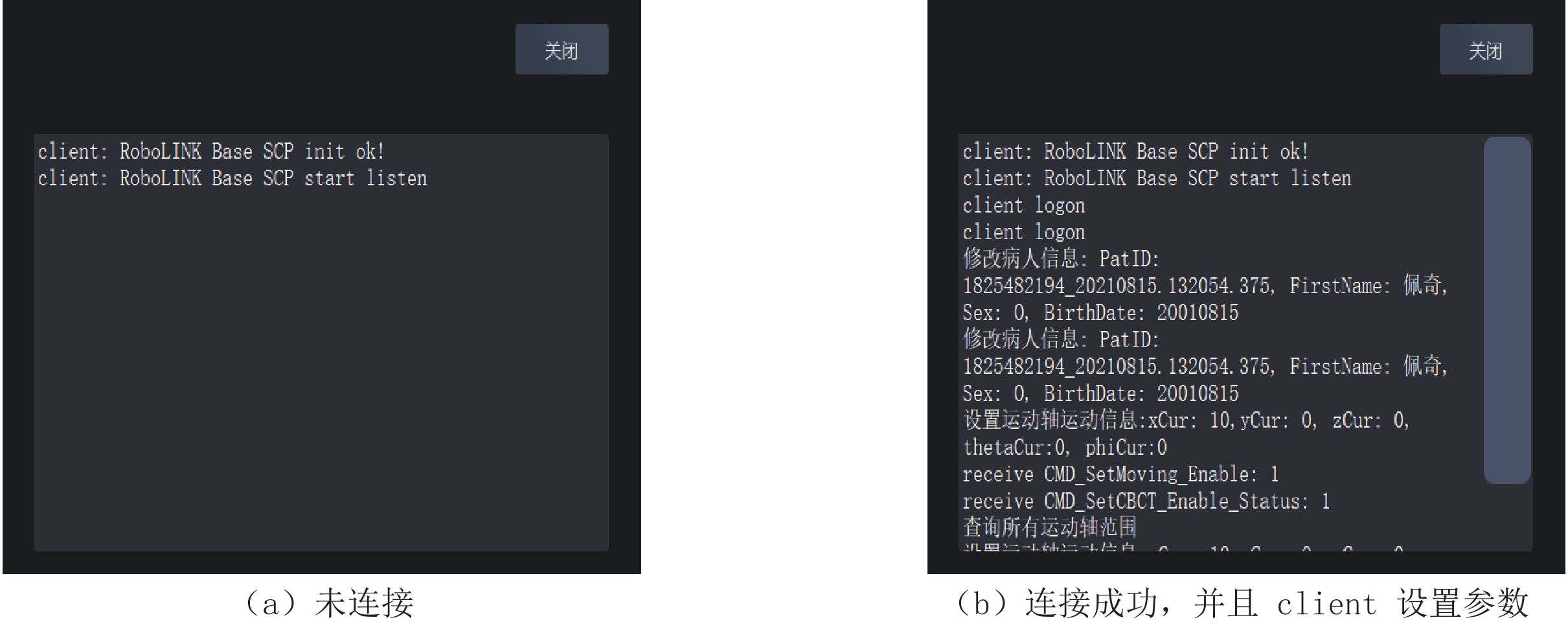
测试项 测试方法 测试结果 基本功能测试 参数设置 验证两端设置是否一致 一致 设备状态反馈 检查日志与实际情况的同步程度(时延误差) 同步,时延误差在
可接受范围内异常情况处理 客户端突然断开 服务端是否立即断开 是 服务器突然断开 客户端是否立即断开,并且停止一切当前活动 是
下载: 导出CSV
表 10 设备响应状况
Table 10 Device response
测试项 测试方法 测试结果 设备控制功能测试 CBCT 是否按预期进行 是 透视 是否按预期进行 是 传输图像数据 是否按预期进行 是 设备状态反馈 检查日志与从设备的同步程度
(时延误差)同步,时延误差
在可接受范围内异常情况处理 网线突然断开 两端是否立即断开,并且从设备进入
安全状态(停止一切运动)是
下载: 导出CSV
-
[1] 黄华文. 计算机辅助外科技术的应用与发展[J]. 中国医疗器械信息, 2007,(1): 18−26, 29. doi: 10.3969/j.issn.1006-6586.2007.01.006 HUANG H W. Application and development of compute assisted surgery[J]. China Medical Device Information, 2007, (1): 18−26, 29. (in Chinese). doi: 10.3969/j.issn.1006-6586.2007.01.006
[2] 潘紫麟, 刘庆鹏. 计算机辅助导航技术在脊柱外科中的应用[J]. 医学综述, 2021,27(11): 2184−2188. doi: 10.3969/j.issn.1006-2084.2021.11.019 PAN Z L, LIU Q P. Application of computer-aided navigation technology in spinal surgery[J]. Medical Recapitulate, 2021, 27(11): 2184−2188. (in Chinese). doi: 10.3969/j.issn.1006-2084.2021.11.019
[3] 王哲琨. 计算机辅助导航技术在口腔颌面外科的应用进展[J]. 现代盐化工, 2020,47(2): 59−60. doi: 10.3969/j.issn.1005-880X.2020.02.029 WANG Z K. Application progress of computer aided navigation technology in oral and maxillofacial surgery[J]. Modern Salt and Chemical Industry, 2020, 47(2): 59−60. (in Chinese). doi: 10.3969/j.issn.1005-880X.2020.02.029
[4] 曹聪. 外科手术导航与机器人系统中图像配准方法研究[D]. 上海: 上海应用技术大学, 2020. CAO C. Research on image registration method in surgicalnavigation and robot system[D]. Shanghai: Shanghai University of Applied Technology, 2020. (in Chinese).
[5] 3D外科导航界面: NaviLink~(TM)的三维C臂系统[J]. 中国医药指南, 2003, (1): 53. [6] 于凤海. DICOM标准综述[J]. 红外, 2003,(9): 30−33. doi: 10.3969/j.issn.1672-8785.2003.09.007 YU F H. Overview of DICOM standards[J]. Infrared, 2003, (9): 30−33. (in Chinese). doi: 10.3969/j.issn.1672-8785.2003.09.007
[7] 赵越, 韩滢, 王之琼. DICOM技术在PACS系统中的应用综述[J]. 中国数字医学, 2009,4(2): 57−60. doi: 10.3969/j.issn.1673-7571.2009.02.019 ZHAO Y, HAN Y, WANG Z Q. Summary of application of DICOM technology in PACS system[J]. China Digital Medicine, 2009, 4(2): 57−60. (in Chinese). doi: 10.3969/j.issn.1673-7571.2009.02.019
[8] National Electrical Manufacturers’ Association. Digital imaging and communication system in medicine (DICOM) NEMA standard publications[J]. 1999, (Sl): 1129.
[9] 张元鲁, 王超. DICOM文件解析及其消息传输[J]. 电脑知识与技术, 2018,14(2): 17−18. ZHANG Y L, WANG C. DICOM file parsing and message transmission[J]. Computer Knowledge and Technology, 2018, 14(2): 17−18. (in Chinese).
[10] 郏岩岩. DICOM图像处理和通信服务程序设计与实现[D]. 广州: 华南理工大学, 2013. JIA Y Y. Design and implementation of DICOM image processing and communication service program[D]. Guangzhou: South China University of Technology, 2013. (in Chinese)
[11] 孙腾. 第五十五讲: 高端医疗设备的功能安全[J]. 仪器仪表标准化与计量, 2016,(5): 12−15. doi: 10.3969/j.issn.1672-5611.2016.05.004 SUN T. Chapter 55: Functional safety of advanced armarium[J]. Instrument Standardization & Metrology, 2016, (5): 12−15. (in Chinese). doi: 10.3969/j.issn.1672-5611.2016.05.004
[12] 冯啸天. 医疗电子设备中自动控制技术的应用[J]. 电子技术与软件工程, 2019,(1): 101. FENG X T. Application of automatic control technology in medical electronic equipment[J]. Electronic Technology and Software Engineering, 2019, (1): 101. (in Chinese).
-
期刊类型引用(15)
1. 张海涛,陈秀琴,柏劲松,舒圣婕,张驰,李宗阳,韩秦刚,朱倩,黄景怡. 个性化扫描与常规扫描对≤1cm肺小结节的CT成像价值比较. 分子影像学杂志. 2023(01): 139-143 .  百度学术
百度学术
2. 许德新,林铿强,陈树兴,潘闪,代祖建,王超平. 肺磨玻璃结节的影像学特征在浸润性肺腺癌中的诊断价值. 福建医药杂志. 2023(05): 12-16 . 百度学术
3. 沈蕾蕾,陈婧,叶晓丹,李惠民. 肺结节的CT后处理技术及征象解读. 中国中西医结合影像学杂志. 2021(02): 201-204 . 百度学术
4. 陈婧,叶晓丹. 肺结节MRI检查的研究进展和临床应用. 中国中西医结合影像学杂志. 2021(05): 506-510 . 百度学术
5. 沈蕾蕾,陈婧,叶晓丹. 磨玻璃密度肺结节的CT诊断. 中国中西医结合影像学杂志. 2021(06): 608-611 . 百度学术
6. 梁海胜,纪律. 多排螺旋CT灌注成像联合图像三维重建技术定性诊断孤立性肺结节的价值. 广西医学. 2020(05): 543-547 . 百度学术
7. 黄文荣,曾勇,苏洁敏,林春材. 多层螺旋CT增强扫描与高分辨率CT诊断周围型肺癌的应用价值. 现代肿瘤医学. 2020(11): 1925-1929 . 百度学术
8. 姜永丰,边传振. 螺旋CT三维重建技术对恶性肺结节的诊断分析. 影像研究与医学应用. 2020(19): 79-81 . 百度学术
9. 祁冬,乔晓春,姚木子,沈艳,胡淑敏,施彪. CTA与DSA在自发性孤立性肠系膜上动脉夹层中诊断中的价值对比. CT理论与应用研究. 2020(05): 606-613 . 本站查看
10. 黄卓琼,周进,李镛. 容积再现技术在孤立性肺结节鉴别诊断中的价值. 临床肺科杂志. 2019(02): 222-225 . 百度学术
11. 罗勇,叶友强. CT三维重建在孤立性肺结节患者的良恶性鉴别诊断价值. 人人健康. 2019(06): 6+8 . 百度学术
12. 饶钦盼,吴芳,樊树峰,陈霞敏. 螺旋CT靶向增强扫描下孤立性肺结节血管集束征的特征分析. 浙江实用医学. 2019(01): 18-20 . 百度学术
13. 易芹芹,周宙,黄国鑫. 基于CT表现的孤立性肺结节良恶性预测模型的研究. CT理论与应用研究. 2019(06): 677-683 . 本站查看
14. 兰斌,宋剑非. 高分辨CT结合肿瘤标记物对孤立性肺结节良恶性判断的临床研究. 世界最新医学信息文摘. 2018(24): 21-24+27 . 百度学术
15. 王新明,刘希胜,李栋. 孤立性肺结节的高分辨CT扫描. 影像研究与医学应用. 2017(07): 101-102 . 百度学术
其他类型引用(6)


计量
- 文章访问数: 414
- HTML全文浏览量: 221
- PDF下载量: 65
- 被引次数: 21


