
Design and Implementation of a 3D C-arm Control Service Protocol (RoboLINK) Based on DICOM
-
摘要: 三维成像技术辅助骨科机器人进行术前规划能够提高手术精确性和高效性,但目前基于三维数据的传统外科导航系统需要预先术前采图,再经过图片导入和人工配准,使得手术步骤愈加繁琐,且患者在采图和手术过程中的位置不同可能导致新的配准误差,导致精确度的降低。鉴于这一需求,本文设计一种基于DICOM协议的3D C-arm控制服务协议(RoboLINK),能将手术机器人和CT连接,可在手术过程中进行CT采图,为当前问题提供新的解决方案。在支持三维C臂与手术机器人进行数据传输的基础上,也可传输运动控制指令,达到设备相互协作的效果。根据以上设计,协议以一影医疗的3D C-arm和模拟手术机器人为实验环境,对协议进行测试。结果表明,RoboLINK协议能够有效完成数据传输和设备控制任务,具有可行性和安全性。Abstract: 3D imaging technology assisted orthopaedic robot for preoperative planning can improve the accuracy and efficiency of surgery. However, traditional surgical navigation systems based on 3D data currently need pre-operative drawing and manual registration. The surgical steps are cumbersome and new errors may be introduced during manual registration, resulting in the reduction of accuracy. To address this need, in this study, we design a remote device control service protocol (RoboLINK) based on the DICOM protocol, which can be used in operation and provides a novel solution to the current problem. Based on supporting data transmission between two medical devices, motion control instructions can also be transmitted to achieve mutual cooperation between devices. In accordance with this design method, the protocol is tested in a shadow medical 3D C-arm experimental environment and a simulated surgical robot. The results indicate that the RoboLINK protocol can effectively complete the tasks of data transmission and equipment control with the advantages of feasibility and security.
-
Keywords:
- DICOM /
- 3D C-arm /
- orthopaedic surgery robot /
- RoboLINK
-
模数转换器(anolog-to-digital converter,ADC)是一种将物理量随时间变化的模拟信号,以一定的采样率和量化误差转化为数字信号的电子器件[1-2]。声波和电磁波等天然信号在宏观尺度下是连续变化的物理量对时间和空间的函数,在探测过程中往往被转化为电压的模拟信号。计算机是分析这些信号最有力的工具,然而它只能储存和处理值域和时域上离散化的数字信号。因此,ADC已成为自然科学与信息科学的桥梁,也是现代工业与科研中不可或缺的核心基础器件。
采样方法是决定ADC架构与性能的底层原理,历史最悠久、应用最广泛的采样方法是规则时域采样[3]。在规则时域采样中,相邻采样点的时间间隔相同,其倒数称为采样率。当采样率大于信号带宽的两倍时,可以不失真地从离散信号中恢复出连续信号[4-5]。20世纪20年代以来,脉冲编码调制和集成电路等技术的长足进步促成了规则时域采样ADC的诞生与发展。由于理论清晰和技术成熟等优势,规则时域采样ADC长期以来一直是模数转换领域的主流方案,形成了包括successive-approximation ADC、delta-sigma ADC、dual-slope ADC、pipelined ADC和flash ADC的技术家族[6]。
20世纪70年代以来,在核物理与粒子物理领域,正电子发射断层成像(positron emission tomography,PET)、中微子探测和核聚变中子能谱等应用需求陆续出现,这些场景要求对数万通道的闪烁脉冲进行数字化,进而获取粒子的能量、时间和方位等信息[7-9]。闪烁脉冲具有极快的上升沿。这意味着,在规则时域采样的框架下,需要高速ADC来实现闪烁脉冲的精确数字化。但是,高速ADC用于海量信号通道有价格高和功耗高的缺点,导致这样的系统在造价和功耗上均不具备可行性。
面对困境,当前折衷的办法是采取模数混合的架构,即先通过模拟器件的整形使得脉冲被拉宽放慢,再用速度较低的ADC进行采样[10-12]。模数混合的思路虽然缓和了数字化和功耗、价格之间的矛盾,但预处理环节的模拟器件改变了闪烁脉冲的形状,引入了新的误差,无法实现闪烁脉冲的精确采样。此外,拉宽放慢的脉冲也限制了探测器计数率的提升。
基于值域采样的多电压阈值(Multi-Voltage Threshold,MVT)数字化方法通过设置若干可编程的电压阈值对信号进行采样[13]。各个阈值电压以及相应的过阈值时刻组成了信号的MVT采样点。在值域采样中,实现信号充分数字化所需电压阈值的数目不随信号变化率的增加而增加。这使得MVT方法能以少量阈值得到的采样点刻画高速上升沿,进而结合脉冲模型实现波形重建。相应地,MVT方法所需的硬件成本与功耗也相对较低,使得海量通道高速闪烁脉冲的精确数字化成为可能。
迄今为止,MVT已被运用在全数字PET、X射线安检机和辐射剂量监测计等产品中,并在中子石油探井、质子放疗监测和核聚变中子观测等领域实现了应用示范[14-19]。凭借成本低、功耗低和集成度高等优势,MVT方法有希望进一步推广至中微子探测和核聚变中子能谱等需要大量通道高速信号数字化的应用场景,以及外层空间实验等需要低功耗数字化方案的应用场景。
本文概述MVT方法的原理,介绍近年来MVT电子学方面的研究进展,展望MVT领域的研究趋势。
1. MVT原理
MVT方法通过若干可编程的电压阈值对信号进行采样,并输出信号电压与阈值电压相等的一系列过阈值时刻,如图1所示。阈值数目取决于硬件,其上限在设计时已经固定。阈值电压可以在设计的范围内在线更改,往往根据目标信号的电压范围,以优化特定性能(如能量分辨率和时间分辨率)为目的而调整。到目前为止,MVT阈值数目的选择和MVT阈值电压的最优化选取尚没有确切的流程,对使用者经验的依赖度较高。
阈值电压与相应的过阈值时刻组成MVT采样点,这些采样点在数学上可以看作信号作为一个函数与各个阈值产生的系列交点,MVT采样点的数目取决于阈值数目和信号经过阈值的次数。由于MVT方法基于值域采样,对于一段单调的信号,在值域不变的条件下,MVT采样点的数目与信号的变化率无关。
从时域角度来看,信号的变化率越快,MVT方法的平均采样率越高;反之,信号的变化率越慢,MVT方法的平均采样率越低。因此,MVT方法对于信号的变化率有自适应的特点,即MVT方法充分数字化信号所需的阈值数目并不随着信号变化率的增加而增加。这一特点使得MVT方法特别适合高速信号的采样。这种自适应性尚未被理论所刻画,即尚没有值域采样的采样定理,这是MVT理论迫切需要解决的问题。
MVT方法最初以PET中高速闪烁脉冲的数字化为背景提出。其中,闪烁脉冲是一种典型的可建模信号,通常包含一段高速上升沿和一段较慢的下降沿。根据探测器所用闪烁体和光电器件的不同,闪烁脉冲的形状可以被直线-指数和双指数等模型刻画。以Ce3+掺杂硅酸钇镥闪烁晶体和硅光电倍增器(silicon photomultiplier,SiPM)的组合为例,在实践中,闪烁脉冲一般用经验性双指数模型刻画[20],
$$ V\left(t\right)=A{\exp}\left({-\frac{t-{t}_{0}}{{\tau }_{1}}}\right)\Biggr(1-{\exp}\left({-\frac{t-{t}_{0}}{{\tau }_{2}}}\right)\Biggr)。 $$ (1) 面向闪烁脉冲的数字化,MVT方法中经典的重建过程是用闪烁脉冲的形状模型拟合MVT采样点,进而提取其中的能量和时间等信息。相较于直接对MVT采样点进行插值,拟合的做法提升了信号重建的精度,也间接提升了能量和时间测量精度。从另一个角度来说,利用先验知识来重建脉冲也减少了所需的阈值数目,从而减少了硬件成本。
阈值电压无法随着每一个脉冲而实时调整,往往根据具有典型能量的粒子(如正电子湮灭产生的)对应的闪烁脉冲而设定。然而,粒子的能量及其对应的脉冲幅值往往在较大范围内连续分布。在对大幅值的脉冲进行采样时,由于MVT阈值电压相对脉冲幅值较低,得到的采样点集中于波形下部,导致拟合得到的脉冲相对原脉冲存在系统性偏差,相应地,MVT能量响应也产生了非线性。通常通过MVT方法得到的能量(MVT能量)与示波器得到的能量(脉冲能量)的散点图来反映MVT的能量响应。拟合后的散点图称为MVT数字化曲线。在MVT能量校正中,一般通过数字化曲线将MVT能量映射到脉冲能量上。
以图2为例[21],一个发射能量为511 keV和1 274 keV伽马的 22Na射源被用于提供伽马光子。由于康普顿散射,这些伽马光子形成了一个从0到1 274 keV的连续能谱。实验所使用的伽马相机包括一个硅酸镥钇闪烁体、一个SiPM和相关读出电路。硅酸镥钇闪烁体的尺寸为3.9 mm×3.9 mm×20 mm。该闪烁体与一个感光面积为3.93 mm×3.93 mm的SensL FJ40045 SiPM耦合。闪烁脉冲的波形,即SiPM的输出,不经过任何前置处理直接输入一台泰克MSO54示波器进行数字化。MVT能量和脉冲能量通过仿真方法从数字化的闪烁脉冲中获得。MVT能量和脉冲能量的关系被经验性地建模为二次函数:
![]() 图 2 校正前MVT能量与对应脉冲能量的梯度图。横坐标为MVT能量,纵坐标为对应的脉冲能量,黑色虚线表示
图 2 校正前MVT能量与对应脉冲能量的梯度图。横坐标为MVT能量,纵坐标为对应的脉冲能量,黑色虚线表示$ E={E}_{\mathrm{M}\mathrm{V}\mathrm{T}} $ 代表的直线,红色虚线代表拟合得到的二次函数Figure 2. Gradient map of MVT energy and corresponding pulse energy before MVT calibration. Black dashed line representing the curve defined by$ E={E}_{\mathrm{M}\mathrm{V}\mathrm{T}} $ . Red dashed line representing the fitted quadratic function$$ E=a{E}_{\mathrm{M}\mathrm{V}\mathrm{T}}^{2}+b{E}_{\mathrm{M}\mathrm{V}\mathrm{T}}+c, $$ (2) 其中:
$ E $ 表示脉冲能量,$ a、b、c $ 表示待定系数。$ a、b、c $ 可根据不同的阈值选取而变化,在这里选取的阈值是50、100、150和200 mV。在这组阈值下,对于高能量的脉冲,采样点分布在波形的下部,无法提供足够的信息以准确地恢复整个波形。因此,MVT能量与脉冲能量存在偏差。基于二次函数模型,可以通过公式(3)对MVT能量进行校正:$$ {E}_{\mathrm{M}\mathrm{V}\mathrm{T}}'=f\left({E}_{\mathrm{M}\mathrm{V}\mathrm{T}}\right)=a'{E}_{\mathrm{M}\mathrm{V}\mathrm{T}}^{2}+b'E_{\mathrm{M}\mathrm{V}\mathrm{T}}+c' ,$$ (3) 其中:
$ {E}_{\mathrm{M}\mathrm{V}\mathrm{T}}' $ 表示校正后的MVT能量,$ a'、b'、c' $ 表示通过对预收集数据拟合得到的参数。此外,图2中左上方存在一些MVT能量与对应脉冲能量显著偏离的事件。这些事件是探测器在短时间内探测到多个伽马光子,使得闪烁脉冲发生堆叠导致的。在这种情况下,闪烁脉冲的波形不能被双指数模型所成功拟合。然而,MVT依赖于脉冲模型来恢复波形。因此,在这种事件中MVT对波形的恢复是不准确的,导致了能量的大幅度偏差。
在更广泛的场景中,所要采样的信号往往没有形状模型可循,也不具备类似闪烁脉冲的分段特点。这种没有先验知识的信号称为盲信号[22]。在时域采样的框架下,从盲信号的采样点中恢复原始信号的方法一般通过时域内插实现。然而,值域采样尚不存在类似的恢复信号的方法,这是MVT理论迫切需要解决的问题之一。
2. MVT电子学
MVT方法所用的电压阈值主要通过比较器、时间-数字转换器(time-to-digital converter,TDC)和数字-模拟转换器(digital-to-analog converter,DAC)等器件实现[23]。比较器用于标记信号的过阈值时间;TDC用于测量信号的过阈值时间[24-25];DAC用于为比较器提供比较电平,即前述阈值电压[26]。如图3所示,在经典的MVT采样过程中,信号首先被按照阈值的数目分为多路分量,并输入到各个比较器中。比较器对信号的电平和DAC提供的比较电平(即阈值电压)进行对比,当信号电平达到比较电平时比较器被触发,比较器输出的数字电平发生翻转。比较器的输出进一步输入到TDC中进行处理,并由TDC测量数字电平发生翻转的时刻,即信号的过阈值时间。各个阈值对应的TDC所输出的过阈值时间数字信号被汇总后传输到上位机中进一步处理。
值得一提的是,相较于基于规则时域采样ADC在探测过程中一直处于采样状态所导致的高功耗,MVT方法的电子学架构决定了在没有脉冲触发阈值时,几乎没有能量消耗。这是MVT方法能耗更低的主要原因。
电源的精度、纹波和噪声,以及DAC的差分非线性和积分非线性决定了MVT电压阈值的设置精度,DAC的分辨率决定了可设置的最小电压间隔。TDC的差分非线性和积分非线性、比较器的延迟时间的偏移和涨落,以及时钟频率决定了过阈值时间的测量精度。TDC的分辨率、比较器的失调电压和最小脉宽时间决定了可测量的最小时间间隔。这些硬件上的性能通过MVT方法的流程最终会传导到脉冲重建的精度,进而影响能量、时间等信息的测量精度,其中,对图2中红色虚线附近数据点的展宽起决定性作用的因素是电源的精度和TDC的分辨率。有必要系统性地归纳与评估这些参数对MVT方法效果以及系统性能的影响,以便于明确硬件优化的下一步方向。
MVT方法电子学实现的本质是对上述比较器、TDC和DAC等器件的优化与集成,以求在尺寸、功耗、精度和通道数等方面不断突破,形成高性能的MVT板卡或芯片。MVT板卡最初由分立器件实现[27]。受制于分立器件的固有大小,MVT板卡难以进一步集成化,性能也受到限制,并未得到广泛应用。FPGA-only架构将TDC、比较器等器件集成于一块现场可编程逻辑门阵列(field programmable gate array,FPGA)芯片中,实现了性能和集成度的飞跃[28-29]。基于FPGA-only架构的MVT板卡在相当长一段时间里是MVT方法电子学实现的主流方案,被广泛用于数字PET、质子治疗监测、中子石油探井等领域。
然而,仅从实现MVT采样的角度来看,市面上的FPGA通常还包含大量冗余硬件,且并未针对TDC、比较器等MVT方法中的关键器件着重优化。因此,FPGA-only架构虽然灵活、易于快速迭代,且只需要消费电子来实现采样过程,但是在功耗、集成度、性能、成本方面仍然有进一步优化的空间。作为与FPGA-only并行发展的另一种技术路线,基于应用专用集成电路(application specific integrated circuit,ASIC)[30-32]的MVT实现以损失灵活性为代价实现了集成度和性能的提升,并降低了功耗和成本,适用于在已知方法和技术路线之下,追求极端性能以及极端集成度的特殊应用。目前,以ASIC技术为基础的MVT芯片已成功流片,在2 524 µm×2 280 µm的面积上实现了8通道的MVT采样。该芯片计划运用在下一代全数字PET上。
MVT电子学的未来趋势是将MVT方法与SiPM整合,以实现高集成度和高时间分辨率的全数字SiPM[33]。与此同时,通过3D堆叠技术避免数字化电路挤占SiPM光敏面积,确保数字SiPM具备高量子效率[34]。在这方面,团队提出了两种技术路线。
一种技术路线将MVT ASIC直接与基于互补金属氧化物半导体(complementary metal oxide semiconductor,CMOS)技术的模拟SiPM集成为一块芯片[35-36];SiPM产生的模拟信号直接输入芯片的MVT采样模块,最终以数字信号的形式输出MVT采样点。另一种技术路线将MVT方法融入了SiPM的读出原理,可实现光子时间序列的重建(MT-SiPM);MT-SiPM微单元的输出被首先转化为阶跃信号,进而加和成表征被激发微单元总数随时间变换的计数阶跃信号;使用MVT方法对计数阶跃信号进行采样和重建;进而通过计数阶跃信号与微单元被激发时间序列之间的微分关系,加以必要的校正,恢复入射光子的时间序列(图4)。而对于传统模拟SiPM,由于单光子响应的展宽,即使不失真地测量SiPM输出的信号,也无法恢复入射光子的时间序列。
3. MVT研究趋势
3.1 闪烁脉冲先验知识
粒子探测是MVT方法最典型的应用。闪烁探测器是粒子探测中最广为使用的探测器类型之一[37-39]。在闪烁探测器中,闪烁脉冲的产生大体上可以分为3步,分别是闪烁光的产生、闪烁光的输运和闪烁光的探测。研究产生闪烁脉冲的物理过程,从而解析地建立闪烁脉冲的形状模型,乃至随机过程模型,对提升MVT方法脉冲重建精度和减少阈值数目有重要意义。此外,这也是彻底理解闪烁探测器能量与时间分辨率物理极限及影响因素的过程中不可或缺的一步[40-42]。
在闪烁光的产生和输运方面,Ce3+掺杂的硅酸钇镥闪烁晶体是当前 PET领域中运用最广泛的闪烁体[43]。2009年,Birowosuto等[44]综述了Ce3+掺杂卤化物闪烁体的发光波长、光输出和时间响应相关研究。Ce3+从 5d→4f的发光存在两个组分:短波发光和长波发光,概率分别设为
$ \varepsilon $ 和$ 1-\varepsilon $ 。考虑自吸收的情况下,设从第n+1级发光中心发出的短波发光光子(简称短波光子)中有比例为$ {a}_{n} $ 的光子在抵达晶体表面前被另一个Ce3+发光中心吸收,$ \eta $ 为被吸收光子重新发射的概率,$ \tau $ 是初始Ce3+发光的衰减时间,$ {N}_{0} $ 是初始时刻处在5d激发态的发光中心总数。Birowosuto等[44]给出了离开晶体闪烁光子的总量随时间变化的函数,$$ {Y}_{{\mathrm{Ce}}{\left({\mathrm{total}}\right)}^{{\mathrm{emit}}}}=\frac{{N}_{0}}{\tau }\left(\Big(1-\varepsilon{a}_{0}\Big)+\sum _{n=1}^{\infty }\Big(1-{a}_{n}\Big)\prod _{m=1}^{n-1}{a}_{m}\frac{1}{n!}{\left(\frac{\varepsilon\eta t}{\tau }\right)}^{n}\right){\exp}\left({-\frac{t}{\tau }}\right)。 $$ (4) 在推导中,Birowosuto等[44]假定初始Ce3+发光衰减服从指数函数。本文指出,该假设的本质是各个Ce3+原子停留在激发态的时间(随机变量)独立同分布于指数分布,其中指数分布是能级跃迁无记忆性假设的自然推论[45]。进一步地,假设吸收是均匀的,即
$ {a}_{n}=a $ ,公式(2)可以简化为:$$ {Y}_{{\mathrm{Ce}}{\left({\mathrm{total}}\right)}^{{\mathrm{emit}}}}\approx \frac{{N}_{0}}{\tau }\Biggr(\left(1-\varepsilon a\right){\exp}\left({-\frac{t}{{\tau }_{{\mathrm{eff}}}}}\right)\Biggr), $$ (5) 其中,
$$ \tau _{{\mathrm{eff}}}=\frac{\tau }{1-\varepsilon a\eta } 。$$ (6) 这项工作解析地给出闪烁光产生的数学模型,但这种函数的形式存在无法刻画噪声等随机因素的缺点;虽然满足了MVT脉冲重建对闪烁光产生过程先验知识的需求,但无法指导时间分辨率和能量分辨率等统计量的优化。本文指出,要解决这一问题,需要退回能级跃迁无记忆性假设,用闪烁光子时间序列的随机过程来刻画闪烁光的产生[46]。
此外,本文虽然考虑次级发光中心对闪烁光的吸收和再发射,但并未考虑材料中其他组分对于光的吸收,以及射线沉积的位置、闪烁体光学性质、闪烁体表面处理和闪烁体包裹材质等复杂因素对输出闪烁光时间响应的影响。对于闪烁光的输运过程,目前已有一些基于蒙特卡洛方法的仿真研究[47-49],但尚没有刻画闪烁光输运的综合性解析模型。
在闪烁光的探测方面,SiPM是当前应用最广泛的光电探测器,具有高增益、低偏置电压、对磁场不敏感、结构紧凑和易于阵列化等优势[50-51]。SiPM由数百到数千个工作在盖革模式的雪崩二极管(Geiger mode avalanche diode,GMAD)构成,其中每个GMAD都是一个光电传感像素[52]。SiPM的建模涉及单光子响应[53-54]、光学串扰[55]、饱和效应[56]、后脉冲和暗计数等方面[57-58]。有工作仿真了SiPM对闪烁光的响应[20],但没有给出相应的解析模型。与传统模拟SiPM相比,MT-SiPM建模的主要不同在于,单光子响应被转化为了简单的阶跃信号。
3.2 MVT方法
作为一种新兴的数字化方法,MVT方法在性能刻画、能量校正和阈值选取方面缺乏标准流程。标准流程的缺乏给MVT方法的推广造成了困难,亟待通过进一步实现方法上的完备化来解决。
在MVT性能刻画方面,当前核科学领域中最主要的能量性能评价指标是通过直方图和特征峰拟合得到的能量分辨率。这样计算得到的能量分辨率受直方图的直方宽度和拟合能窗等主观参数的影响,可比性较差。有工作将直方图建模为能量概率密度函数的等间隔采样,通过引入规则时域采样定理和时域内插公式,数学上不失真地从直方图中重建能量概率密度函数,在一定程度上克服了这一问题[59]。但是,该方法目前仅在 22Na伽马能谱和示波器上进行过验证,其普遍意义上的有效性有待在更复杂的能谱和更多种类的数字化方式中进行检验。另一方面,能量分辨率只能反映测量特定能量的随机误差,但无法反映全局上的随机误差和非线性能量响应导致的系统误差。作为能量分辨率的补充,亟待建立一种能全面衡量数字化方法量能性能的新指标。
此外,不同于基于规则时域采样ADC所具有的固定且明确的量程。如图1所示,在有先验信息的参与下,MVT方法所能测量的最大幅值并不限于其最大阈值电压。实验表明,MVT方法的量能精度在脉冲幅值达到最大电压阈值后随着幅值的增大而逐渐衰减,不存在明确的边界。因此,有必要定义一个新的概念,来表征MVT方法在量能方面的动态范围。
在能量校正方面,由于在系统级别的实践中数字化通道的数量巨大,且各个通道的能量响应存在差异而无法运用参数相同的数字化曲线加以校正,通过示波器得到各个通道的数字化曲线并逐一校正的方式并不现实[21]。一种可能的改进思路是利用多个已知能量的核素(包括闪烁体中的放射性元素)及其在能谱中的对应位置作为参考点,使用MVT和SiPM一步校正公式来实现校正[60]。
首先,用整机系统分别采集 22Na、137Cs、60Co和 176Lu等核素产生的伽马光子,并获得未经过校正的各个通道的能谱。通过识别算法自动找到能谱中这些核素对应特征峰,并记录特征峰未校正前的能量,得到一系列成对的校正前能量值和对应的能量真值。运用校正前能量值和对应的能量真值拟合MVT能量响应与SiPM能量响应符合的能量响应函数,得到相关拟合参数。基于拟合得到的能量响应函数,对能量进行校正。在阈值选取方面,MVT方法的阈值选取需考虑到基线电压、基线噪声和目标脉冲幅值等因素。不幸的是,相关经验仍较为零散,尚未形成系统性的阈值选取流程。
3.3 MVT理论
MVT方法的本质是值域采样。值域和时域(定义域)作为函数数域的两个方面,在数学结构上存在对称性。相对已沿用百年的时域采样体系,值域采样在理论方面仍然有待研究。
时域采样理论的发展历史可以大体上通过被采样信号类型和采样模式来划分[3]。以采样信号的类型来划分,最先得到研究的是对于确定信号的采样,进而推广到对于随机过程的采样[61-62]。这一步推广使得时域采样理论所研究的信号更接近于真实信号,增强了理论对实践的刻画与指导能力。以采样模式来划分,最先得到研究的是规则时域采样,进而推广到非规则时域采样[63-64]。这一步推广使得通过压缩感知等方式实现低于Nyquist频率采样的不失真信号恢复成为可能[65-67]。相关成果已经运用到核磁共振(nuclear magnetic resonance,NMR)成像中的信号处理等领域,有效提升了NMR成像的成像速度[68]。
本文认为,值域采样理论大体可以规划为两个发展阶段。第一阶段,从时域角度来看,值域采样是一种带约束的非规则时域采样。其中的约束在于,位于信号两个及以上极值点之间的阈值会多次与信号相交,产生的采样点均具有相同的电压。因此,可以在非规则时域采样的数学框架下,发展值域采样的过渡性理论。第二阶段,为了自然地描述值域采样,需要将上述约束消去,并融入理论本身。因此,需要直接在值域的角度考虑问题,即建立值域采样的数学框架。在这个数学框架中,采样率的地位需要被阈值取代,带宽和频域等概念也需要调整。对此,正如同傅立叶变换在时域采样理论中所起的枢轴作用,新的数学工具需要被建立[69]。
本文大胆推测,考虑到勒贝格积分以值域基础的区间划分方式,其很可能与这一数学工具存在紧密关系[70]。在这一阶段中,为了渐进地建立理论,本文建议首先研究规则值域采样的数学理论,进而在采样信号类型和采样模式上分别向随机过程采样和非规则值域采样拓展。闪烁脉冲的形状模型可以被视为随机过程的均值函数而在理论中加以考虑[71]。
4. 结论与展望
以值域采样为基础的MVT方法成本低、功耗低、集成度高,且所需的阈值数目不随着信号变化率的增加而增加,因而特别适合大规模高速信号的数字化。经过20年发展,MVT方法在电子学实现方面已经建立了完整的技术体系,形成了成熟的产品,并在全数字PET等核科学领域实现了应用示范和产业化。
面向MVT体系的完备化,本文指出,未来的MVT研究要瞄准闪烁脉冲先验知识、MVT方法范式和值域采样数学理论3个方面。在此基础上,本文建议,应找准MVT方法的优势应用场景——大规模高速信号的数字化,实现在核科学内外更多领域的规模化应用,从而最终达成与传统时域采样的互补,为已逾百年的模数转换领域注入新鲜血液。
致谢:感谢胡文韬为本文提供了MVT电子学的架构设计图(图3),凌怡清、于俊豪和朱婧敏为论文修改提供的宝贵建议。
-
![]()
图 6 协议测试环境。(a)一影医疗的三维C臂,(b)模拟骨科手术机器人示意图
Figure 6. Protocol test environment (a) is a 3D C-arm from First Image, (b) is Simulated orthopedic surgery robot
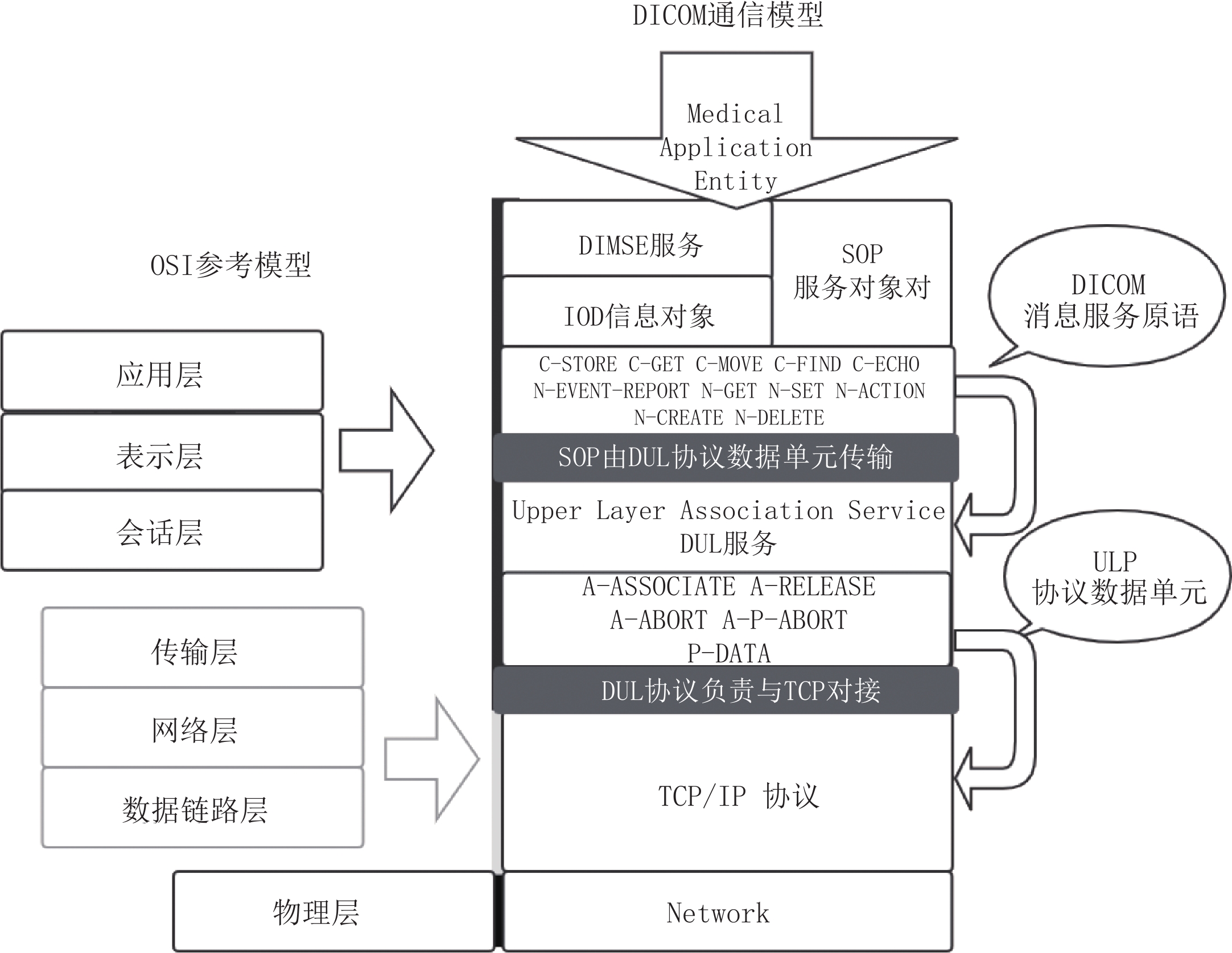
表 1 本文使用的DIMSE服务组
Table 1 The DIMSE service group used in this article
名称 功能 组别 DIMSE-C C-STORE 存储图像 C-FIND 按照属性查找图像 C-ECHO 检验DICOM连接 DIMSE-N N-EVENT-REPORT 报告当前状态 N-GET 获取属性值 N-SET 设置属性值 N-CREATE 创建SOP对象实例 N-DELETE 删除SOP对象实例  下载: 导出CSV
下载: 导出CSV
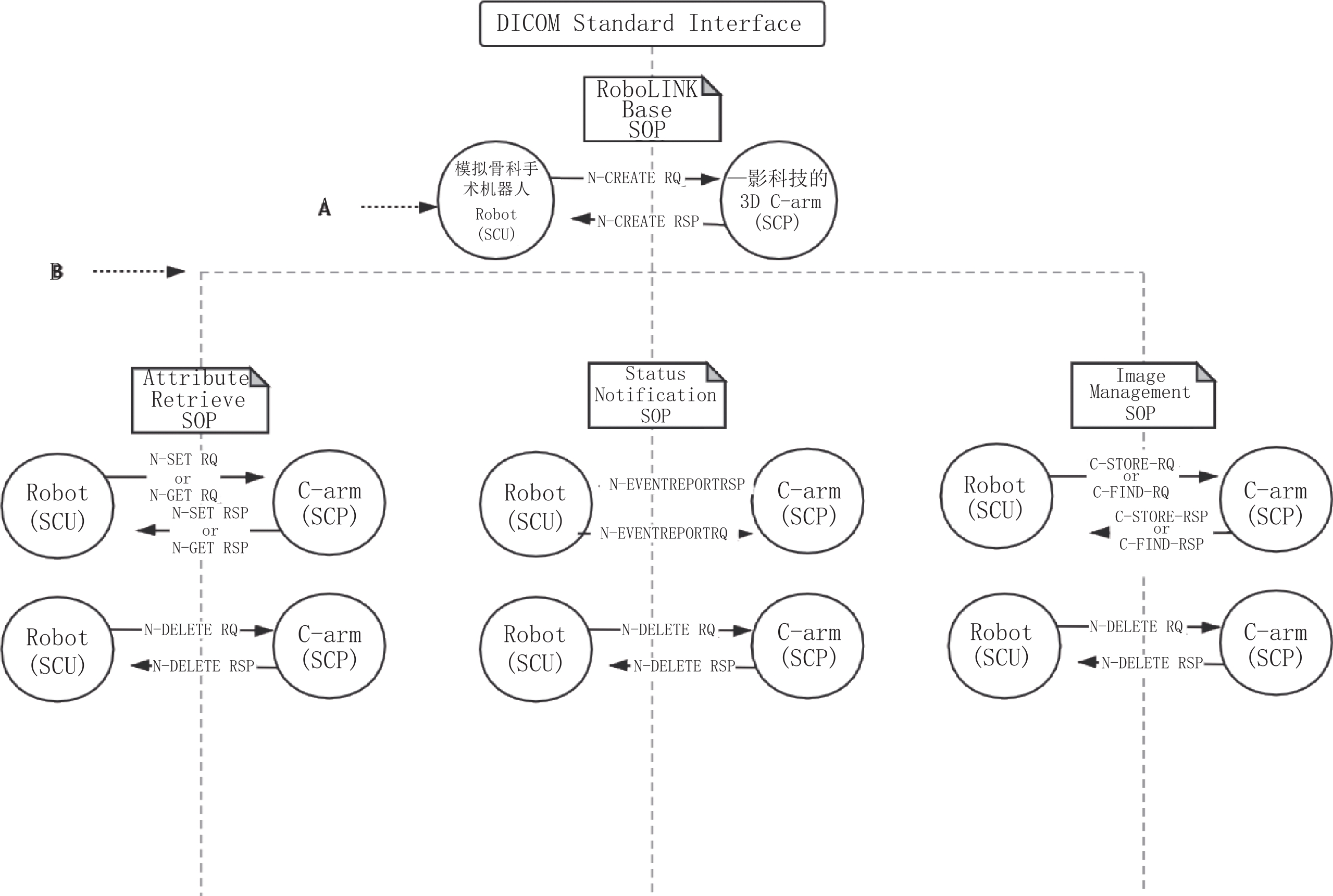
表 2 RoboLINK Base SOP服务元素
Table 2 Service elements of RoboLINK Base SOP
DIMSE服务元素 用法SCU/SCP N-CREATE M/M 注:M: Mandatory。
下载: 导出CSV
表 3 RoboLINK Base SOP服务状态
Table 3 Service status of RoboLINK Base SOP
服务状态 含义 状态码 Success SOP创建成功 0000 Failure 已经存在可用的SOP,必须注
销后才能创建新的SOPC616
下载: 导出CSV
表 4 RoboLINK Attribute Retrieve SOP 服务元素
Table 4 Service elements of RoboLINK Attribute Retrieve SOP
DIMSE服务元素 用法SCU/SCP N-SET M/M(根据功能选其一) N-DELETE M/M
下载: 导出CSV
表 5 RoboLINK Attribute Retrieve SOP私有属性表
Table 5 The private property of RoboLINK Attribute Retrieve SOP
属性名 Tag VR VM 描述 SYSTEM_Cmd 0x0041,0x0010 IS 1 系统信息ID编号 RobLinkServerVer 0x0041,0x0011 LO 1 RoboLink版本 ackSystemReport_Msg 0x0041,0x0032 LT 1 返回设备功能开启状况 reqSetMotionValues 0x0043,0x0040 LO 1 设置运动位置信息 ackCurAllSystemMsg 0x0041,0x0020 LO 1 系统各轴当前状态
下载: 导出CSV
表 6 RoboLINK Attribute Retrieve SOP状态
Table 6 The status of RoboLINK Attribute Retrieve SOP
服务状态 含义 状态码 Success SOP创建成功 0000 Warning 请求功能超出SOP的操作范围 B605 Failure 已经存在可用的SOP,必须注销后才能创建新的SOP C616
下载: 导出CSV
表 7 RoboLink Status Notification SOP服务元素
Table 7 Service elements of RoboLINK Status Notification SOP
DIMSE服务元素 用法SCU/SCP N-EVENT-REPORT M/M N-DELETE M/M
下载: 导出CSV
表 8 RoboLink Status Notification SOP私有属性表
Table 8 The private attribute of RoboLINK Status Notification SOP
属性名 Tag VR VM 描述 RoboLinkFunList 0x0041,0x0013 LO 1 产品支持功能
PatientRegist/MotionCtrl/CBCTWorkflowackCBCT_Step_Status 0x0041,0x0022 LO 1 CBCT步骤状态 ackFindAllSystemMsg 0x0041,0x0031 LO 1 系统各轴运动状态
下载: 导出CSV
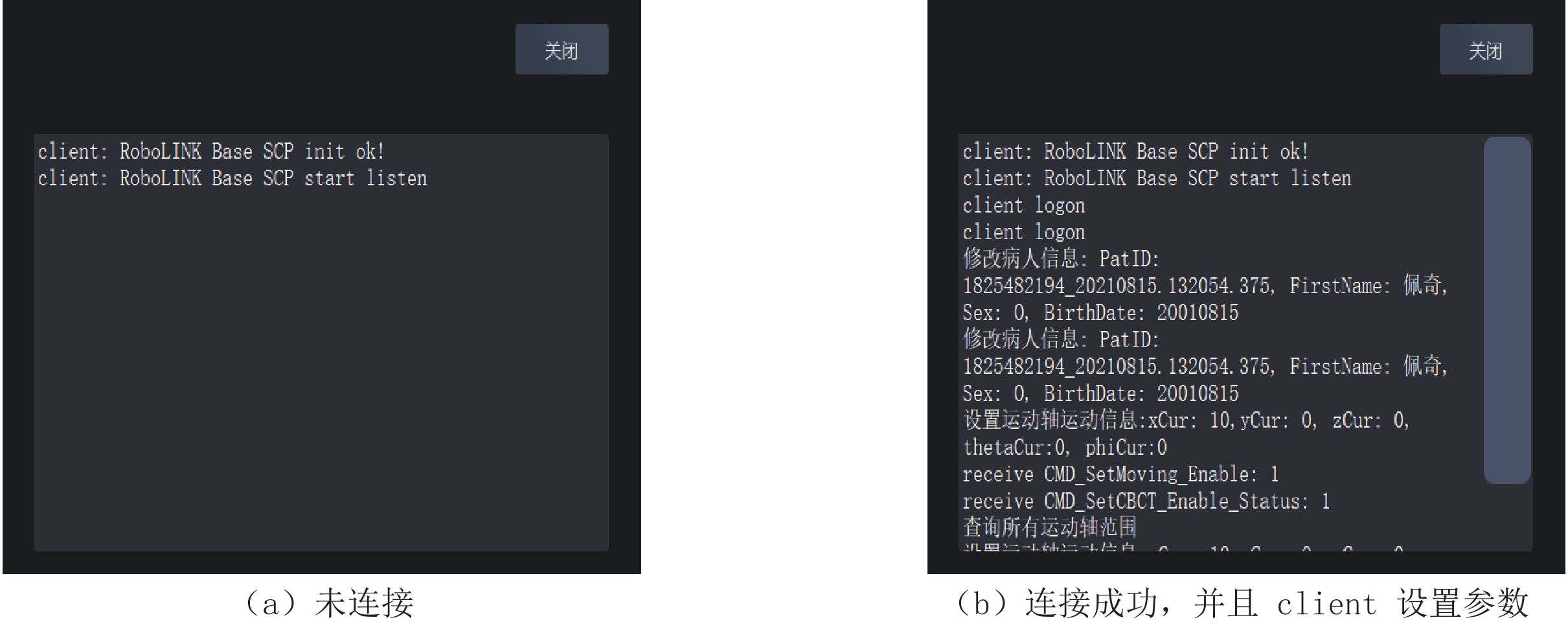
表 9 软件功能测试
Table 9 Test of software function
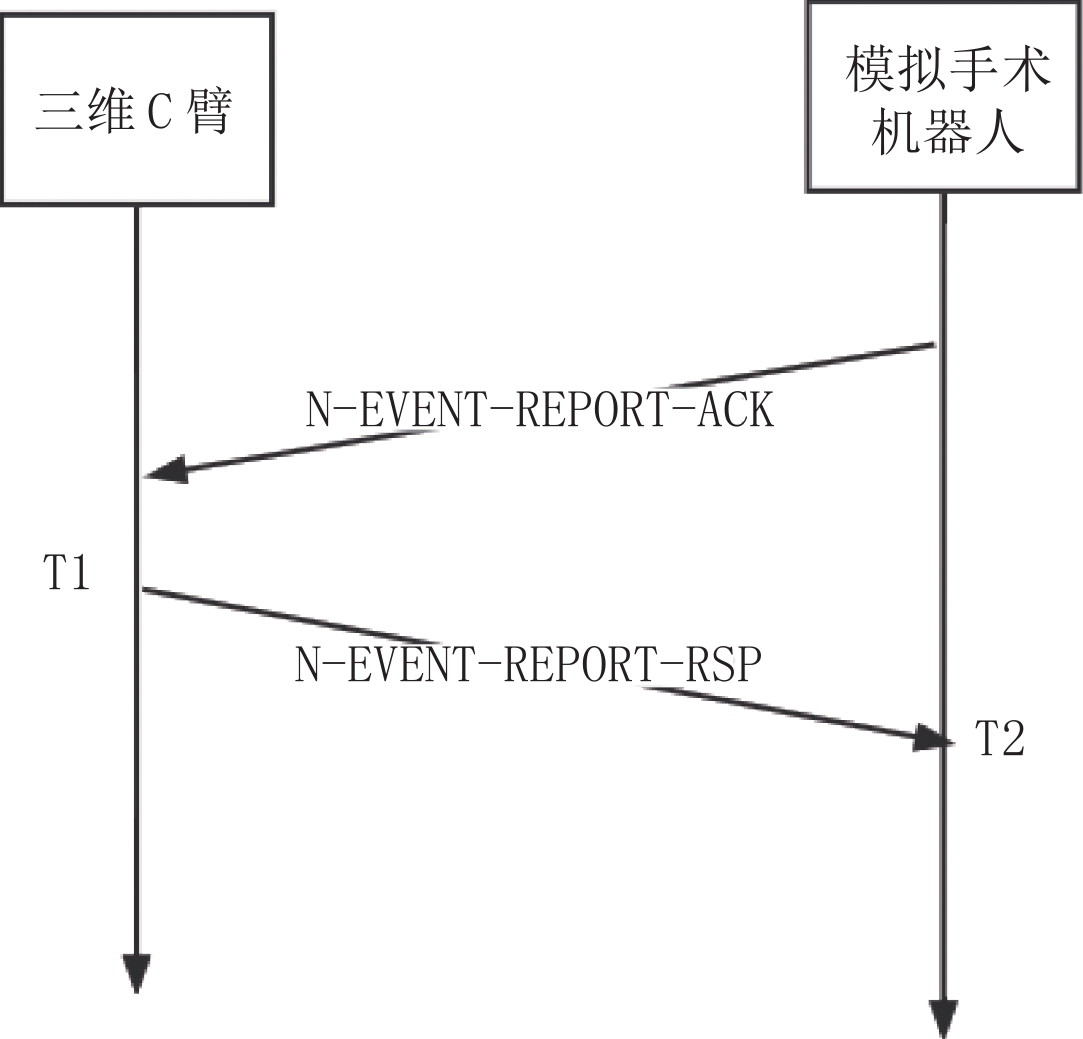
测试项 测试方法 测试结果 基本功能测试 参数设置 验证两端设置是否一致 一致 设备状态反馈 检查日志与实际情况的同步程度(时延误差) 同步,时延误差在
可接受范围内异常情况处理 客户端突然断开 服务端是否立即断开 是 服务器突然断开 客户端是否立即断开,并且停止一切当前活动 是
下载: 导出CSV
表 10 设备响应状况
Table 10 Device response
测试项 测试方法 测试结果 设备控制功能测试 CBCT 是否按预期进行 是 透视 是否按预期进行 是 传输图像数据 是否按预期进行 是 设备状态反馈 检查日志与从设备的同步程度
(时延误差)同步,时延误差
在可接受范围内异常情况处理 网线突然断开 两端是否立即断开,并且从设备进入
安全状态(停止一切运动)是
下载: 导出CSV
-
[1] 黄华文. 计算机辅助外科技术的应用与发展[J]. 中国医疗器械信息, 2007,(1): 18−26, 29. doi: 10.3969/j.issn.1006-6586.2007.01.006 HUANG H W. Application and development of compute assisted surgery[J]. China Medical Device Information, 2007, (1): 18−26, 29. (in Chinese). doi: 10.3969/j.issn.1006-6586.2007.01.006
[2] 潘紫麟, 刘庆鹏. 计算机辅助导航技术在脊柱外科中的应用[J]. 医学综述, 2021,27(11): 2184−2188. doi: 10.3969/j.issn.1006-2084.2021.11.019 PAN Z L, LIU Q P. Application of computer-aided navigation technology in spinal surgery[J]. Medical Recapitulate, 2021, 27(11): 2184−2188. (in Chinese). doi: 10.3969/j.issn.1006-2084.2021.11.019
[3] 王哲琨. 计算机辅助导航技术在口腔颌面外科的应用进展[J]. 现代盐化工, 2020,47(2): 59−60. doi: 10.3969/j.issn.1005-880X.2020.02.029 WANG Z K. Application progress of computer aided navigation technology in oral and maxillofacial surgery[J]. Modern Salt and Chemical Industry, 2020, 47(2): 59−60. (in Chinese). doi: 10.3969/j.issn.1005-880X.2020.02.029
[4] 曹聪. 外科手术导航与机器人系统中图像配准方法研究[D]. 上海: 上海应用技术大学, 2020. CAO C. Research on image registration method in surgicalnavigation and robot system[D]. Shanghai: Shanghai University of Applied Technology, 2020. (in Chinese).
[5] 3D外科导航界面: NaviLink~(TM)的三维C臂系统[J]. 中国医药指南, 2003, (1): 53. [6] 于凤海. DICOM标准综述[J]. 红外, 2003,(9): 30−33. doi: 10.3969/j.issn.1672-8785.2003.09.007 YU F H. Overview of DICOM standards[J]. Infrared, 2003, (9): 30−33. (in Chinese). doi: 10.3969/j.issn.1672-8785.2003.09.007
[7] 赵越, 韩滢, 王之琼. DICOM技术在PACS系统中的应用综述[J]. 中国数字医学, 2009,4(2): 57−60. doi: 10.3969/j.issn.1673-7571.2009.02.019 ZHAO Y, HAN Y, WANG Z Q. Summary of application of DICOM technology in PACS system[J]. China Digital Medicine, 2009, 4(2): 57−60. (in Chinese). doi: 10.3969/j.issn.1673-7571.2009.02.019
[8] National Electrical Manufacturers’ Association. Digital imaging and communication system in medicine (DICOM) NEMA standard publications[J]. 1999, (Sl): 1129.
[9] 张元鲁, 王超. DICOM文件解析及其消息传输[J]. 电脑知识与技术, 2018,14(2): 17−18. ZHANG Y L, WANG C. DICOM file parsing and message transmission[J]. Computer Knowledge and Technology, 2018, 14(2): 17−18. (in Chinese).
[10] 郏岩岩. DICOM图像处理和通信服务程序设计与实现[D]. 广州: 华南理工大学, 2013. JIA Y Y. Design and implementation of DICOM image processing and communication service program[D]. Guangzhou: South China University of Technology, 2013. (in Chinese)
[11] 孙腾. 第五十五讲: 高端医疗设备的功能安全[J]. 仪器仪表标准化与计量, 2016,(5): 12−15. doi: 10.3969/j.issn.1672-5611.2016.05.004 SUN T. Chapter 55: Functional safety of advanced armarium[J]. Instrument Standardization & Metrology, 2016, (5): 12−15. (in Chinese). doi: 10.3969/j.issn.1672-5611.2016.05.004
[12] 冯啸天. 医疗电子设备中自动控制技术的应用[J]. 电子技术与软件工程, 2019,(1): 101. FENG X T. Application of automatic control technology in medical electronic equipment[J]. Electronic Technology and Software Engineering, 2019, (1): 101. (in Chinese).
-
期刊类型引用(1)
1. 黄晓颖,李霞敏,郭方凯,王鹏朝,单春辉,暴云锋. 低剂量CT灌注联合双能扫描在胰腺神经内分泌肿瘤中的应用. CT理论与应用研究(中英文). 2025(03): 369-375 .  百度学术
百度学术
其他类型引用(0)


























计量
- 文章访问数: 413
- HTML全文浏览量: 221
- PDF下载量: 64
- 被引次数: 1


